After the great succes with the default LoRaWAN Node I really wanted to design an inexpensive Node with an build-in antenna for small LoRaWAN use cases.

Good antenna’s are expensive!
When it comes to antenna’s, one thing is certain: Good antenna’s aren’t cheap.
I guess we all bought those crappy cheap antennas in the past to find out they are not designed for that frequency or don’t work at all..
Choosing for an onboard antenna makes you node compact an even more low cost. You don’t need those antenna connectors, cables and antennas. Any PCB based antenna won’t have the same range as an “real” antenna but the goal is to get about half the distance.
The new antenna: Ceramic chip or custom antenna design?
For an onboard antenna you can easily chose an ceramic chip antenna for the desired frequency. There are a lot of these antenna chips available and it doesn’t take a lot of experience to use them. They can save you most space on your PCB.
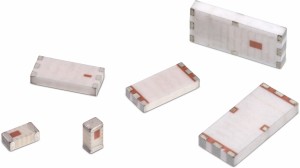
Most of these chips are affordable but I decided to not use any chip antenna and design my own antenna!
Making the ideal antenna takes some time and a certain knowledge in electronics, HF and antenna’s. This includes everything from calculations, simulations, designing, prototyping, measuring, and modifying before the results are really satisfying.
The design
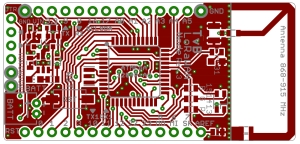
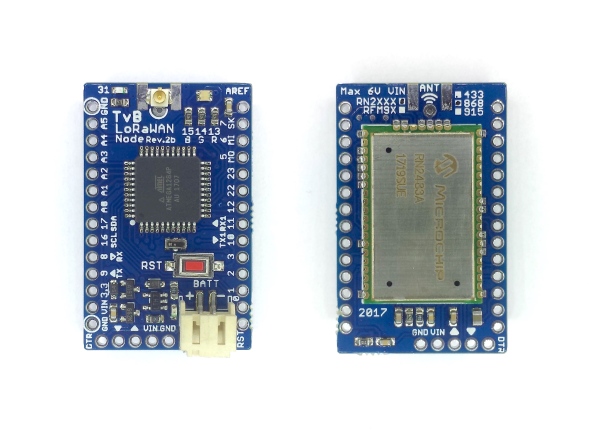
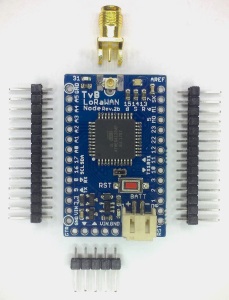
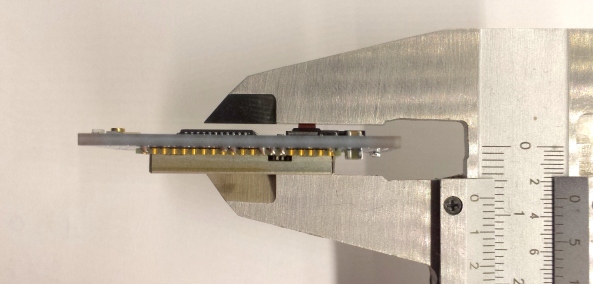
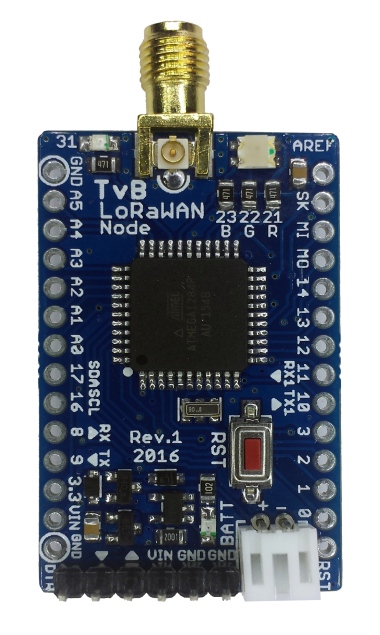
For the new Node I didn’t want to change anything from my existing proven “TvB LoRaWAN Node”. This limits the available space to a width of 26mm for the antenna.
Here’s the initial design I came up with:
Verifying, measuring, optimizing and testing the antenna design took a while but the result was worth it.
The final measurements concluded that the center frequency of the antenna design is about 20 MHz’s off the 868 MHz goal. So we’re not there yet.
That’s great, but what does that mean?
An design update, mostly based on measurements.
The most important thing of any antenna is the range. To get the maximum out of your antenna the center frequency has to match the desired frequency as best possible. This point will transmit the most RF energy resulting in a better range.
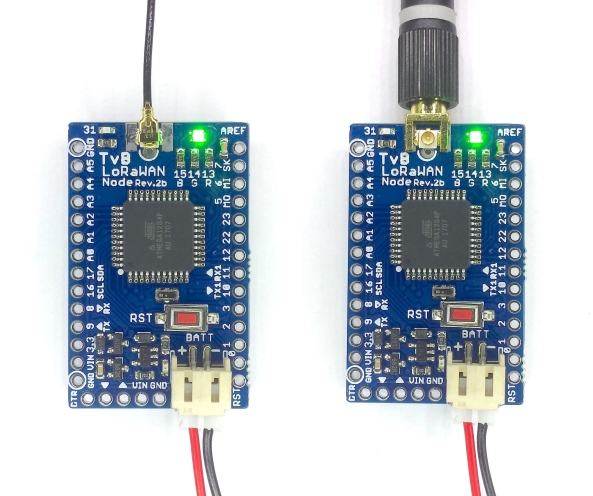
You can’t compare a lab measurement with an real world test so you always have to verify the range. After assembling the first prototype it’s time to put it to the test!
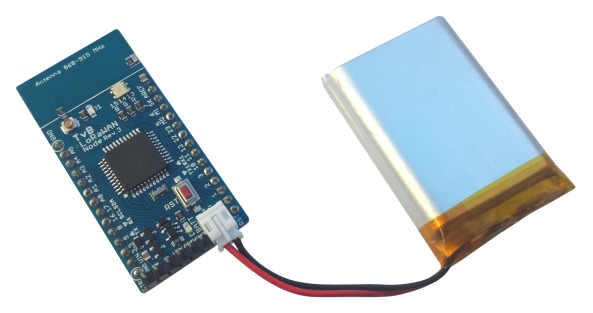
For range testing I simply hooked up an GPS module to the battery powered Node.
The Node receives a GPS location form the GPS module and transmits it’s location every 15 seconds over LoRaWAN.
When a message is received on the gateway(‘s) you can simply plot the distance between transmitter and receiver.
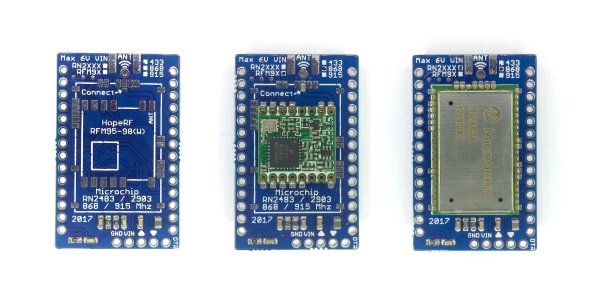
For testing purposes I used an RFM95W LoRa module from HopeRF, with the default LoRaWAN settings (SF12). That’s it!
The range, what can you expect from internal, microstrip antenna’s?
I didn’t expect much from a small antenna but I guess I’m wrong. LoRaWAN is a very impressive technology that’s able to send messages over many and many km’s.
Practical measurements with a regular node (default λ/4 antenna for 868 MHz) results in maximum ranges up to 20km and more in the ideal situation.
I guessed the range of the internal antenna would be around a couple of km’s with a maximum range of 5 km’s. Everything beyond that would be great.
Range test, the first test-drive
I didn’t expect much from the first range test-drive. In the message log I was hoping to find a couple of messages but there much more received messages than “just a couple”. Meaning only one thing: The Node works!
Analyzing all location data showed distances up to a whopping 9 km from inside the car!
All other range measurements confirmed this first impression.
Conclusion
I may decide that this node has a guaranteed range of about 5 km for LoRaWAN use cases in real world. Almost all messages within that radius are well received on the gateways.
The test data also showed that the antenna acts as a directional antenna, performing a little bit better in the one direction than the other. Unlike an default λ/4 antenna that radiates the same amount of energy in all directions.
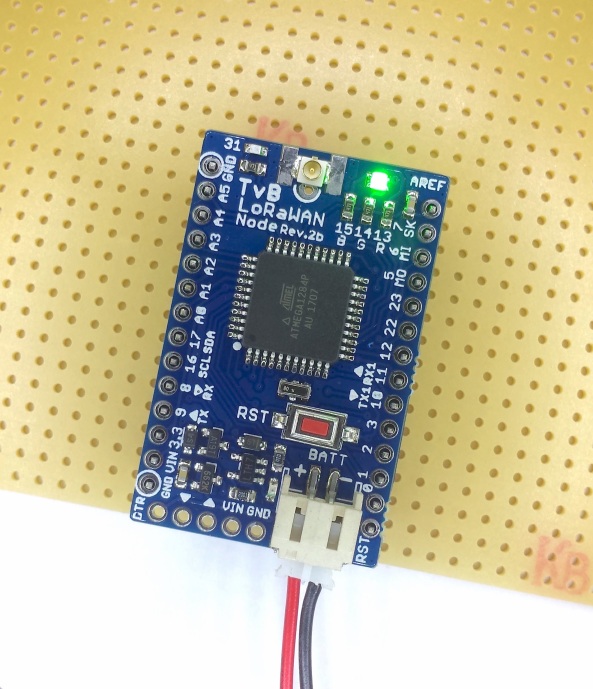
The node has to be used with the antenna pointing upwards for the best results.
Hardware details

Work in progress
There’s still some space for improvement. Because the used frequency in Europe is 868MHz I’ve optimized the design for that exact frequency.
Based on the measurements on the first design I made a couple of different modified versions. The good news: some of them perform better than the first version because they have more gain on 868MHz.











 Features of the new board:
Features of the new board: